Cours 117 : Multiplexage – Le bus CAN
Depuis quelques années, dans tous les domaines de l’industrie, sont apparues les commandes numériques en réseau. Ces réseaux composés d’émetteurs, récepteurs, contrôleurs, actionneurs et afficheurs communiquent en temps réel. Cette communication est composée de signaux numériques (binaire) défini par un protocole de communication en fonction de leurs critères techniques et de leur utilisation.
Il existe plusieurs types de protocoles de communication CAN
SAE J1939, CANopen, ISOBUS, CANaerospace, …
Principe
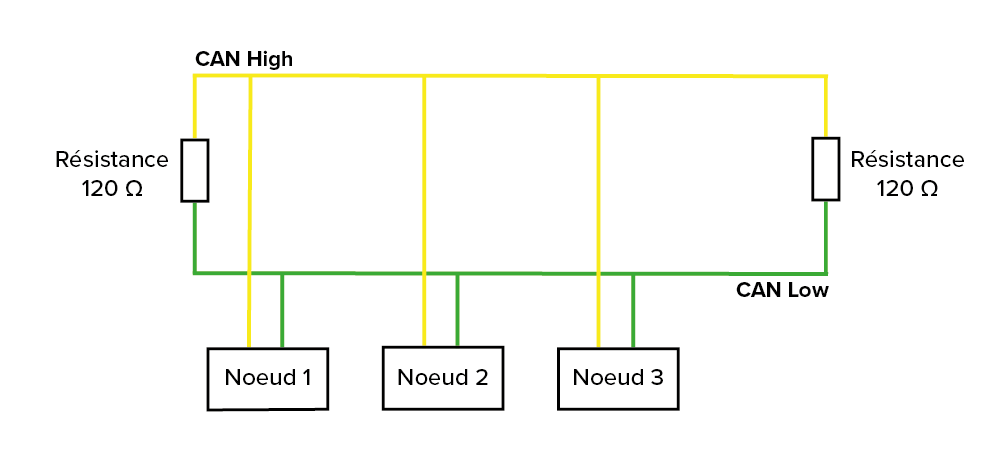
Les différents organes de commande sont reliés et communiquent sur un bus unique (2 fils) et non sur des lignes dédiées
Schéma de principe d’un réseau CAN
Avantages
Au-delà des très grandes possibilités de communication qu’il serait très difficile d’atteindre par un circuit analogique classique, ces systèmes permettent une simplification très importante du câblage, d’où un gain de poids et une augmentation de la fiabilité.
Une telle architecture nécessite des contrôleurs pour gérer les différents flux d’informations afin d’interpréter les informations entrantes des composants électroniques (capteurs, joysticks, …) et générer les informations nécessaires aux actionneurs (valves, vérins, …)
Inconvénients
Parmi les désavantages, il est clair que les interventions sur de tels circuits ne peuvent être effectuées que par du personnel compétant, formé à ces technologies et équipé de moyens souvent spécifiques (PC, contrôleur, logiciel, licence, …).
Pour aller un peu plus loin sur le BUS CAN
Le Bus CAN (Controller Area Network) est né du besoin de trouver un moyen de communication série intelligent dans les véhicules automobiles, son utilisation s’est étendue à beaucoup d’autres secteurs.
C’est un réseau de terrain qui permet, grâce à son protocole et un câblage simplifié d’échanger un nombre très important de variables à très grande vitesse et suivant des priorités prédéfinies. Grace au contrôleur et à sa mémoire, ces informations ou défaillances peuvent être mémorisées, ce qui permet de vérifier les fonctionnements.
Chaque message transitant sur le réseau se voit attribué un identifiant (ID=adresse du message) qui précède les données.
La norme CAN définit deux formats de protocole : Standard (Version2.0 A) et Extended (Version2.0 B). La différence résulte seulement dans la longueur de l’identifiant (ID) qui est de 11 bits en mode Standard (CANopen) et 29 bits en mode Extended (SAE J1939). Le nombre d’octets de données échangées dépends du besoin et du protocole utilisé (communément 8 octets/trame).
Un ou plusieurs calculateurs se trouvent au cœur de la machine et sont raccordés à tous les composants (nœuds) sur le réseau CAN par le bais du bus constitué des lignes CAN-H et CAN-L. Le signal électrique est différentiel : chacune des lignes CAN est référencée à l’autre ligne, et non pas à la masse électrique. Cela permet une meilleure immunité au « bruit électromagnétique ». Les deux extrémités du bus doivent être rebouclées par des résistances de 120 Ω.
La plupart des réseaux CAN d’un véhicule fonctionnent à une vitesse de bus de 250 Kbit/s ou de 500 Kbit/s, bien qu’il existe des systèmes dont le fonctionnement atteint jusqu’à 1 Mbit/s ce qui influence sur la longueur maximum du réseau.
Continuez à nous suivre pour explorer davantage ces avancées technologiques dans nos prochaines Newsletters !