Cours 13 : L’hydraulique proportionnelle 1/2
Il s’agit d’une manière de répondre à certaines exigences de fonctionnement de machine. Parmi les plus courantes on peut citer : la rampe d’accélération d’un récepteur, ou encore la multitude de réglages d’une machine.
Il y a 2 grandes façons de commander une valve proportionnelle :
La commande manuelle
Comme on peut avoir sur un distributeur hydraulique.
Exemple : pour un distributeur, plus l’inclinaison du levier est importante, plus le récepteur va vite.

La commande électrique proportionnelle
C’est cette seconde version, électrique, que nous allons présenter.
Les grands avantages :
Possibilité de modifier les performances du ou des récepteurs à volonté.
Souplesse de fonctionnement, précision, diminution du nombre de composants…
Les principaux inconvénients :
Connaissances particulières pour intervenir, plus sensible à la pollution…
Exemple :
Lexique:
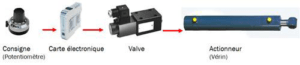
Une consigne : signal électrique de faible puissance, 0/10Vcc, 4/20mA, valeur numérique…
Cette consigne est générée par : un joystick, un potentiomètre, un automate, une pédale…
Une carte électronique : elle a pour rôle d’amplifier la consigne pour alimenter avec une puissance suffisante la valve hydraulique. Elle peut être séparée ou intégrée à la valve.
Une valve proportionnelle : Valve comportant des spécificités technologiques telles que : son usinage et sa bobine. Ses performances dépendent entre autres : de sa taille et de la présence en interne d’un capteur de recopie ou non. Elle ne peut être commandée que par sa carte électronique, intégrée ou non.
Boucle ouverte : architecture de circuit où la mesure du paramètre final (effort, vitesse, position) n’est pas prise en compte pour corriger une éventuelle dérive de la partie électro-hydraulique. C’est le montage le plus simple et le moins onéreux. Si dans un circuit, il y a une valve avec capteur de recopie intégré, cela n’en fait pas un circuit en boucle fermée !
Boucle fermée : Architecture de circuit où la mesure du paramètre final (effort, vitesse, position) est prise en compte pour corriger une éventuelle dérive de la partie électro-hydraulique. C’est le montage le plus performant, mais il est aussi plus complexe (il sera le sujet d’une prochaine newsletter !).
Le réglage d’un système proportionnel
On distingue 3 grands réglages :
| 1 | 2 | 3 |
| Le zéro / I mini / polarisation / pré-magnétisation : |
Le max / gain / mise à l’échelle : |
Les rampes : |
| Pour une consigne nulle, c’est la valeur mini obtenue en sortie. Sur certains systèmes, la consigne nulle peut-être d’une valeur de 6V ! – à consigne nulle, il peut y avoir un courant pour la bobine dit, courant de pré-magnétisation. |
A consigne maximum c’est la plus grande valeur de sortie obtenue. |
C’est ce qui est couramment utilisé pour créer des accélérations et ou décélérations progressives malgré des variations de consigne rapides. Très appréciées elles amènent une souplesse de fonctionnement. |
